系统科学与工程学院成功举办2025年大创结题验收及2026年大创申报动员大会
2025年12月24日,系统科学与工程学院顺利举办2025年大学生创新创业训练计划结题验收会,同时拉开2026年大创项目申报动员序幕。在此次验收大会上,共有15个项目组以饱满的热情参与了结题答辩,共同见证了这段科研探索旅程的丰硕成果。


各项目组分别从选题背景、项目实施过程、项目成果及心得体会等方面展开汇报,展示一年科研的成果和收获。评委老师们就项目的研究方法、实施流程、成果的创新性与应用性等方面深入提问、细致点评,为同学们提供宝贵改进建议。最终,经过学院老师的评审,参与结题答辩的大创项目均顺利通过,其中5个项目被评为优秀,10个项目被评为良好。

项目1 :基于YOLO的水炮自瞄系统
团队成员:崔迪生(负责人) 岑岱 刘朝尹 毛俪钐
指导老师:侯燕青
项目简介:
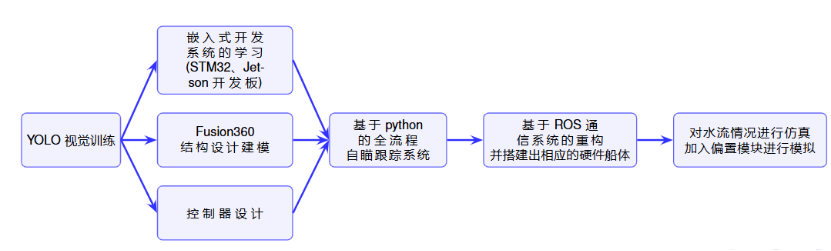
项目聚焦于智能水炮系统的技术验证与流程打通,尝试将 YOLO 目标检测算法与 ROS2 分布式架构进行融合应用:依托 YOLO 算法的高效识别能力,实现对动态目标的快速定位;借助 ROS完成控制系统的集成设计,完成目标的追踪与瞄准指令的传输执行。项目中部分功能模块采用仿真方式开展验证,核心则围绕算法模型的落地与系统流程的贯通展开。
成果简述:
1. 项目成功搭建完整的ROS2分布式智能水炮自瞄系统实现了从图像采集、目标检测、坐标变换到舵机控制的全流程贯通,并初步完成了硬件的搭建和测试。核心算法方面,优化了控制器、跟踪算法及坐标变换等追踪模块。硬件平台采用双体无人船设计,适配多种摄像头与计算模块,性能持续优化。

2. 水上平台的设计荣获第十四届全国海洋航行器设计与制作大赛省级二等奖,并与多个大创组的队员合作,共同赢得了2025年“申达杯”智能无人系统应用挑战赛的国家级一等奖。本项目与多个大创组成员合作获得国家级奖项并正在着手申请一项软件著作权,后续进一步对水流射击场景进行仿真,为该成果的进一步落地继续探索。
项目2 :宽速域乘波体设计与气动分析设计
团队成员:林汉鹏(负责人)、张哲恺、唐骁、孙姿勤、赖佳敏
指导老师:段焰辉
项目简介:
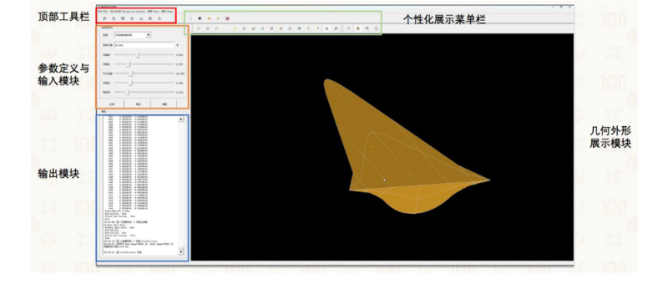
该项目研发宽速域乘波体设计与气动分析软件,针对传统乘波体仅适配特定速度范围、气动性能受限的问题,基于密切锥和密切流场思想,创新实现后掠角可控的双后掠乘波体设计(含无过渡段类型)。软件集成圆锥流场计算、乘波体生成、气动分析、流线追踪等功能,通过全链条算法达成秒级设计与气动评估,可输出IGES/STEP标准CAD格式,具备直观图形用户界面,支持参数输入、设计、分析及结果输出一体化操作,核心指标满足工程应用需求。
成果简述:
1.本研究基于密切锥和密切流场思想,提出后掠角可控的双后掠乘波体设计方法(含无过渡段类型),集成 “密切锥流场 + 流线追踪 + 参考温度粘性力 + RBF 面插值” 全链条算法,突破传统乘波体速度范围限制。
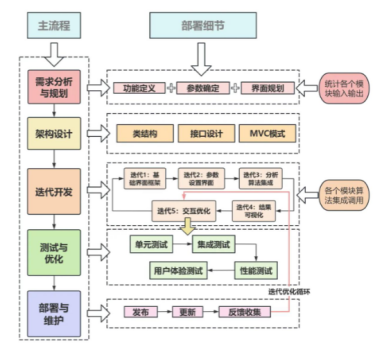
2.基于本研究开发的软件围绕宽速域乘波体设计与气动分析核心需求,实现多元功能:支持单后掠、双后掠(含无过渡段)等多类型乘波体生成,集成圆锥流场计算、流线追踪功能;可快速分析升力、阻力、升阻比等关键气动指标,秒级完成设计与评估;配备直观GUI,实现参数输入、设计、分析及结果输出一体化操作;支持IGES/STEP标准CAD格式输出,适配后续工程应用,满足科研与工程场景的多样化需求。
3.在《气体物理》期刊发表相关学术文章,系统阐述设计方法、算法原理及软件实现逻辑;申请一项中国发明专利保护核心技术,斩获 2025 年 “大湾区杯” 粤港澳 AI for Science 科技竞赛金奖。
项目3:分布式多传感融合:
虫情监测与空中目标识别打击一体化系统
团队成员:黄皓凌(负责人)、李溢涵、陈俊宇、蒋团杰
指导老师:侯燕青
项目简介:
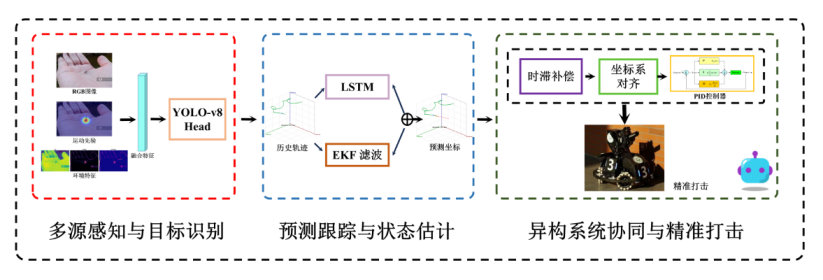
分布式多传感融合:虫情监测与空中目标识别打击一体化系统,旨在解决传统害虫防治过度依赖化学农药导致的环境污染,以及现有物理防治设备缺乏智能化识别与高精度打击能力的痛点。针对蚊虫等微小目标尺度小、运动轨迹随机、背景复杂等技术难题,本项目研发了一套基于多源数据融合的闭环系统,实现了“感知—预测—控制—执行”的一体化,推动农业防治向绿色、精准、高效方向转型。
成果简述:
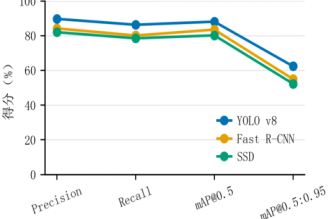
1.在本研究中,项目组以 YOLOv8 为基线模型,构建了面向高动态目标的特征增强感知框架。通过引入视觉分支、运动先验与环境约束的特征级融合机制,显著提升了模型在动态模糊背景下的识别能力,检测精度 Precision 达到89.7%,mAP@0.5 达到 88.1%,漏检率由 18.5% 降低至 11.2%。
2.系统集成了基于 LSTM 的短时轨迹预测与 EKF 非线性滤波技术,有效缓解了传感器传输与执行机构存在的系统时滞。通过标准 ROS 接口实现异构设备协同,在目标距离 0.8—1.5m 范围内实现了 82.9% 的单次命中率。项目成果已成功迁移至移动底盘定位增强与机械臂高频抓取场景,并斩获中国机器人及人工智能大赛国家级一等奖、“申达杯”无人系统挑战赛国家级一等奖等多项荣誉。
项目4:IRS在无线通信系统的
前沿研究与应用
团队成员:庞坤(负责人) 陈玙梵 鲁航宇
指导老师:肖绍球
项目简述:
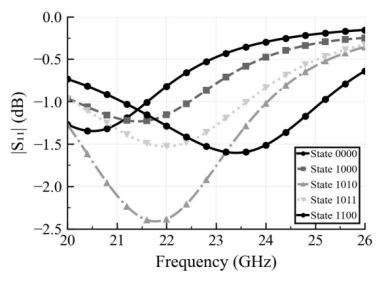
该项目针对K波段(20-26GHz)高频通信路径损耗大、易遮挡,以及传统可重构智能超表面(RIS)带宽窄、相位线性度差的问题,基于密切耦合和多层谐振思想,创新提出旋转工字型谐振器的三层RIS架构。通过双模耦合与垂直互联设计,集成反射层PIN二极管控制、双谐振层相位调控、铜通孔垂直互联等功能,实现宽带、低损耗、高线性度的360°相位覆盖,反射损耗<1.6dB,在22-23GHz核心频段线性拟合度达R²=0.9991,满足6G通信波束赋形的工程应用需求。
成果简述:
1. 本研究基于双模耦合与垂直互联思想,提出旋转工字型谐振器的多层RIS单元设计方法,集成“反射层可重构控制+双谐振层耦合+铜通孔互联”全链条架构,突破传统单层RIS带宽与线性度限制。通过消融实验验证,无谐振层导致相位调控能力极差且损耗>5dB,无通孔出现高频状态混叠,证明组合设计的必要性。
2. 基于本研究开发的RIS单元在K波段实现卓越性能:工作频段覆盖20-26GHz,相位调控范围约352°;在22-23GHz核心频段展现完美线性响应(R²=0.9991),拓展至21.523GHz仍保持R²=0.9989的高线性度;主要编码状态反射损耗<1.6dB,保证宽带信号无畸变反射与群时延稳定,为高频宽带波束赋形提供可靠硬件基础。
3.项目研究成果已被欧洲天线与传播国际会议EuCAP 2026接收,系统阐述基于旋转工字型谐振器的相位控制机理、PIN二极管编码状态设计及性能优化策略,为6G通信RIS技术发展提供理论支撑与工程参考。

项目5:结合深度学习方法的交互式多模型
无人机机动目标跟踪方法研究
团队成员:佘恺涔(负责人)、赖天腾、陈佳煊、何谦、闫智馨
指导老师:刘熙
项目简介:
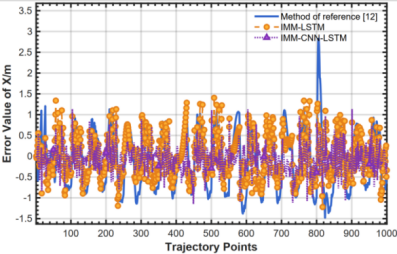
在复杂动态环境(如城市峡谷、密集障碍物区域)下,传感器易受多径效应、信号遮挡等因素干扰,进而导致精度降低。研究有效地跟踪精度补偿机制,对于提升系统在恶劣条件下的性能可靠性具有重要意义。传统的单一模型卡尔曼滤波方法在应对机动目标或复杂环境时,难以达到理想效果。本项目旨在构建一种融合“交互式多模型滤波 + 深度学习误差补偿”的轨迹跟踪方法,以解决无人机在复杂动态环境中的轨迹跟踪精度不足问题。
成果简述:
1.本项目成功构建并验证了一种融合“交互式多模型滤波(IMM-EKF)与深度学习误差补偿(CNN-LSTM)”的无人机机动目标跟踪方法,该方法在复杂动态环境下显著提升了轨迹跟踪的精度与鲁棒性。实验结果表明,所提的IMM-EKF-CNN-LSTM方法在X、Y、Z轴三个方向上的估计值与真实值的均方根误差(RMSE)均为最低,其性能显著优于传统CV+CA方法、仅使用IMM的方法以及IMM-LSTM等对比方案,有效解决了复杂机动场景下的模型失配问题。
2.本项目开发的系统有效提升了无人机在复杂动态环境中的轨迹跟踪精度和鲁棒性;相关研究成果撰写论文《Trajectory Tracking for Unmanned Aerial Vehicles Based on IMM-EKF and CNN-LSTM》,并已发表在EI检索国际会议International Conference on Automation, Control and Robotics Engineering (CACRE)。
3.项目成员携研究成果积极参与学术交流。我们重点分享了融合 IMM-EKF 多模型滤波 与 CNN-LSTM 残差补偿的方法框架、实验对比结果及在复杂场景中的性能提升,并与同行就模型集设计、非线性滤波稳定性与深度学习补偿机制等问题开展了深入交流。

系统科学与工程学院始终秉持以学生成长为核心的教育理念,全力鼓励并支持本科生深度参与大学生创新训练计划。深度融合本科生导师制,搭建全面成长平台,全方位培育学生科研创新能力,提升学习力、思想力、行动力,实现学以致用、知行合一,助力学生成长为适应创新型国家建设需求的高水平创新人才,为人才强国、科技强国战略添砖加瓦。
本年度,大学生创新创业训练计划项目圆满收官,这不仅集中展示了青年学子的科研探索成果,更生动见证了他们的无限潜能与璀璨才华。他们以创新为帆,以智慧为桨,在科研的浩瀚海洋中乘风破浪、勇往直前,不断探索未知、挑战极限。