我院空天智能无人系统团队在《IEEE Robotics and Automation Letters》发表新成果
近日,我院空天智能无人系统团队在机器人领域国际顶级期刊《IEEE Robotics and Automation Letters》(影响因子:5.3)发表论文 “Lyapunov-based Control Barrier Functions for Real-Time Safe Navigation in Three-dimension Complex Environments”,第一作者为硕士研究生张富伟,通讯作者为侯治威副教授。该研究工作得到国家自然科学基金青年基金项目(项目编号:62203481)和中山大学人工智能研究院的支持。
该研究针对复杂三维环境中的无人机(UAV)安全导航与控制难题,提出了一种基于李雅普诺夫函数的控制障碍函数(Lyapunov-based CBF)统一框架,在保持实时性的同时兼顾安全性与稳定性,为自主系统的安全导航与控制提供了新的理论与方法。
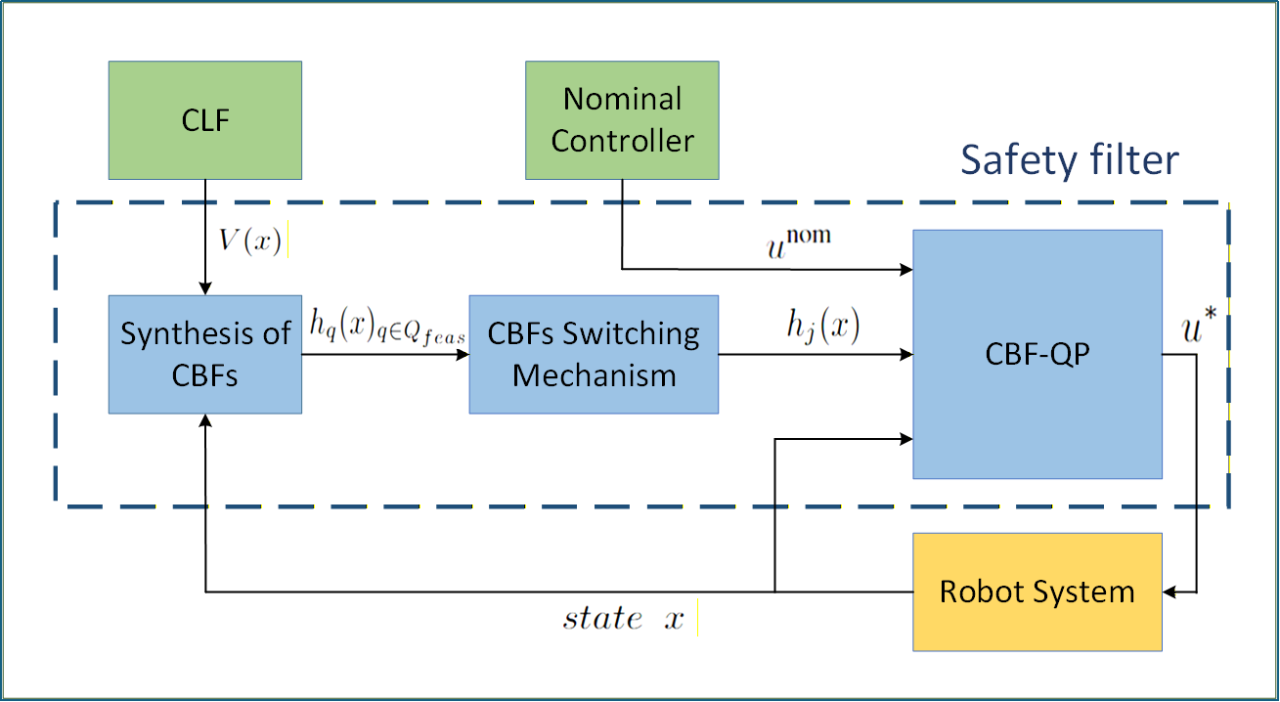
图1 Lyapunov-based CBF安全滤波器框架
控制障碍函数(CBF)是实现机器人安全控制的重要工具,它通过与二次规划(QP)相结合,形成安全滤波器,能够在不改变原始控制策略的前提下,实时修正控制输入,从而确保系统状态始终处于安全区域内。
但在高维非线性系统和复杂环境中,CBF设计常面临计算代价高、适用性差的问题。本论文提出一种基于李雅普诺夫函数的CBF在线合成方法,通过控制李雅普诺夫函数及系统的平移对称特性,实现了CBF的自动生成与实时更新,使得CBF-QP安全滤波器能够在复杂环境中实现实时安全导航与稳定控制的统一。
本论文提出的方法具有三方面突出优势:
1. 安全与稳定统一:在同一框架下兼顾运动稳定性与安全约束,使系统在安全导航的同时仍保持内部状态的渐近收敛。
2. 高可扩展性:通过论文提出的框架,研究人员可直接结合现有的CLF构造方法生成CBF,大幅降低设计难度。得益于CLF的丰富研究基础,该方法可推广至多类复杂非线性系统。
3. 实时高效:该方法通过局部在线合成,实现在线计算量与环境规模部分解耦,适用于大范围、部分未知的三维环境。
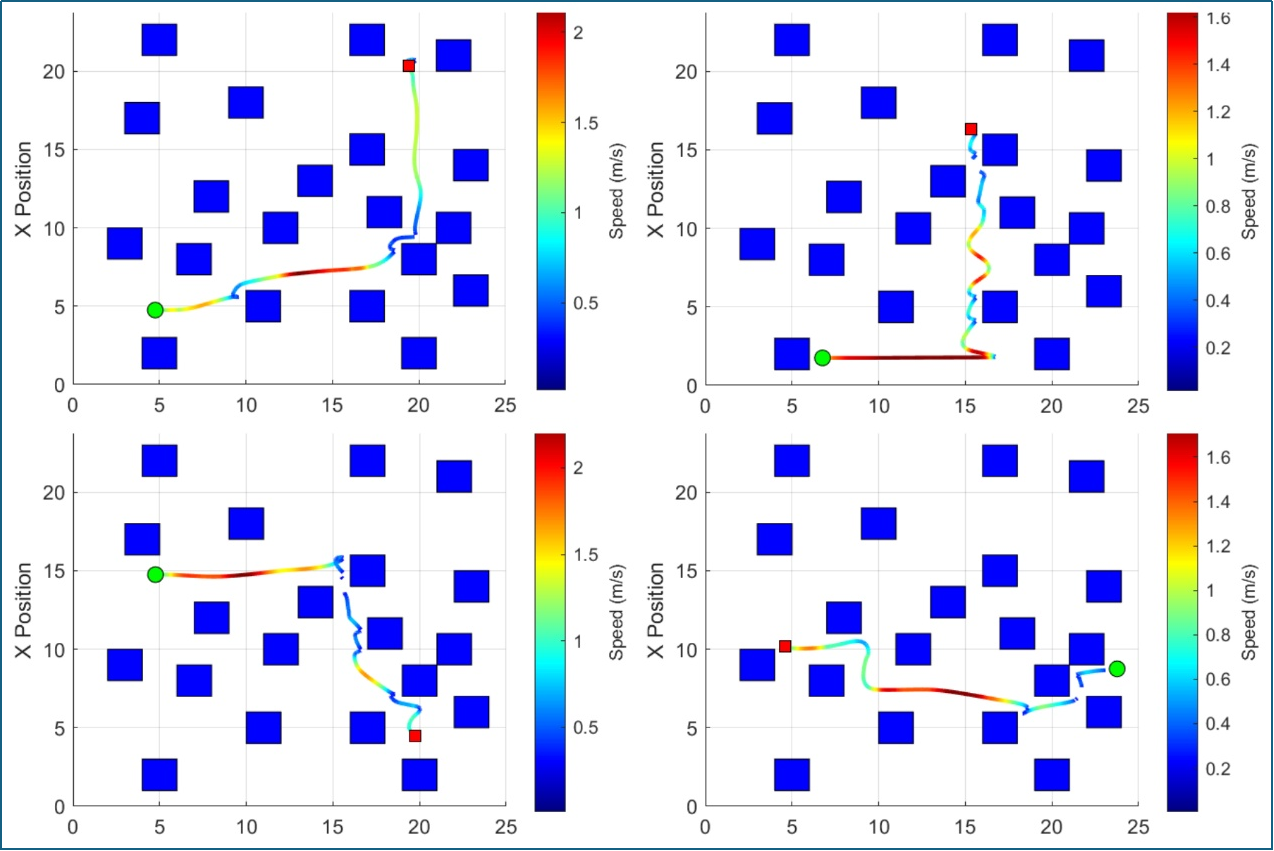
图2 平面双旋翼系统在不同路径下的仿真结果
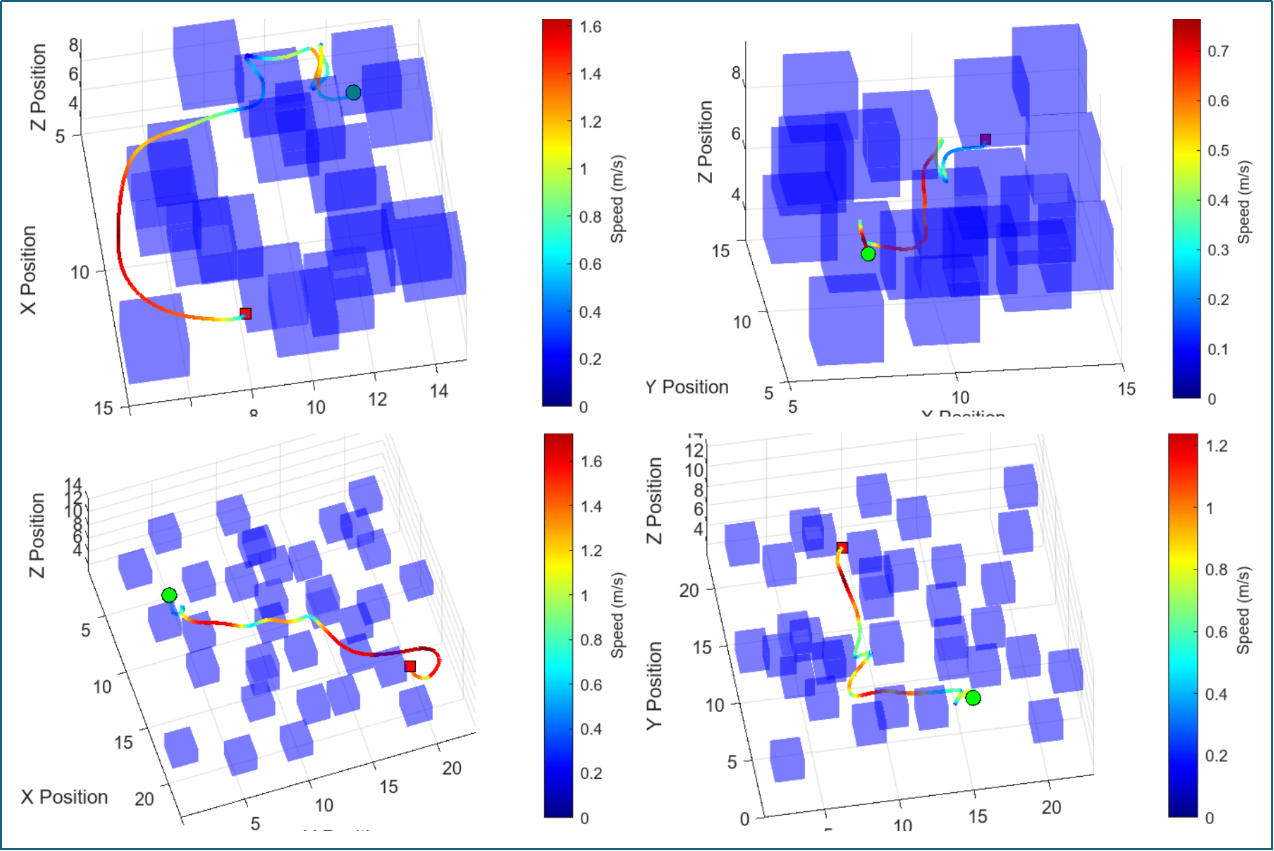
图3 三维无人机系统在不同路径下的仿真结果
研究团队在平面双旋翼系统与三维无人机平台上进行了大量仿真与实机实验验证。基于DJI Robomaster TT无人机的实验表明,该算法单次迭代计算时间仅需15–25 毫秒,完全满足实时控制需求。无人机在障碍密集环境中实现了安全稳定的自主飞行,验证了算法的高效性与鲁棒性。

图4 DJI Robomaster TT无人机的飞行轨迹及飞行场景
该研究成果为无人机、自主车辆及多机器人系统在未知或动态环境下的安全导航与控制开辟了新路径。研究团队下一步计划将该方法拓展至动态障碍场景,融合感知输入与轻量神经网络,构建端到端的安全控制闭环。这一成果不仅彰显了学院在控制理论与机器人应用交叉领域的深厚积累,也进一步印证了学院在无人系统智能控制与安全自主导航方向上的持续创新能力。
论文链接:
https://ieeexplore.ieee.org/document/11260965